全2193文字
日産自動車が2022年7月25日に発売した新型SUV(多目的スポーツ車)「エクストレイル」は、同社が培ってきた電動化技術や4WD制御技術、シャシー制御技術を融合して統合的に制御する電動4WDシステム「e-4ORCE」を初搭載した(図1)。

図1 日産自動車の新型SUV「エクストレイル」
電動4WDシステム「e-4ORCE」を搭載したグレード(写真:日経Automotive)
[画像のクリックで拡大表示]
前後にあるモーターとブレーキを協調制御して車の姿勢を制御することによって、カーブ手前の減速で前のめりになるようなピッチング(車両が前傾や後傾になったりする回転運動)やアンダーステア(コーナリングで狙ったラインよりも外側に膨らんでしまう現象)などを大きく抑える。同社はこの技術を、2024年3月に発売した電気自動車(EV)「アリア」にも搭載するなど、展開を進めている。さらに、次なる進化として見据えているのが、砂地や雪上など通常のアスファルト路面以外にもこの技術を適用することだ。
そのために同社は、2020年から宇宙航空研究開発機構(JAXA)の宇宙探査イノベーションハブと、研究課題「電動駆動制御による砂地走破性の向上」に関する共同研究を進めている。きっかけは宇宙探査イノベーションハブの公募に日産が応募したこと。同社企画・先行技術開発本部先行車両開発部部長の中島敏行氏は「e-4ORCEの技術を砂漠など通常路面以外でもメリットを出せるようにしたいと考えているところだった」と振り返る。
JAXAは月面の資源探査などで活用する探査車(ローバー)向けの駆動力制御技術の確立を目指している。月面は「レゴリス」と呼ばれる細かい砂に覆われた軟弱地盤で、タイヤが砂に埋まって動けない状態(スタック)に陥る危険が常につきまとう。スタックは宇宙ミッションにとって死活問題で、かつて米航空宇宙局(NASA)の火星ローバーのタイヤが砂に埋もれて探査継続が困難になったことがある。
太陽電池という限られた電力リソースで探査を行う必要があるため、ローバーには、消費電力を抑えた効率的な走行が求められる。開発を加速するため地上向けの制御技術をベースに、こうした技術を開発することが急務となっているJAXAと、日産の思惑が一致した。
両者の共同研究は、砂地での走破性のメカニズムを解明することから始まった。JAXA相模原キャンパス内の宇宙探査実験棟の屋内フィールドで、月面ローバーの駆動力制御技術に関する検証実験を行った。具体的には、JAXAが試作した月面ローバーの研究モデルに、e-4ORCEを搭載して様々なデータを取得した。「屋内実験場なので安定したデータが取れる。そこで取得したデータを分析したり、机上で計算ができるようになったりしたことで、砂とタイヤの間に何が起こっているかが、だんだん分かるようになった」(中島氏)
メカニズムはこうだ。砂地でタイヤを空転させると、タイヤには車を前に進める力と抵抗が逆方向に働く。空転させないと前へ進まないが、車が進む速度に対して回転数が大きすぎるとその場を蹴るような感じになって沈んでいく。そうなると、抵抗が増える。つまり、砂の抵抗と進める力の差で車の加速力が決まる(図2)。
「タイヤの空転量をうまく制御することで、効率重視か加速重視かの走りを選べる。車の場合は、ドライバーの意図や走行シーンに合わせて制御することで、最適な走破性を実現できる」(同社先行車両開発部主担の伊藤健介氏)
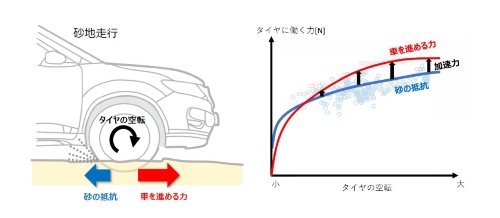
図2 砂地走行制御のメカニズム
砂地や車両の状態に応じてタイヤの空転量を精密に制御することで、最適な走破性能を実現できる。ガソリンエンジンでは精密な制御は難しかったが、電動化によってそれが可能になったという(出所:日産自動車)
[画像のクリックで拡大表示]
このメカニズムをシミュレーションで再現し、制御システムを設計した。さらに、それを車両に搭載して実験でデータを取得する、というループを何度も回すことで検証を進めていった。
からの記事と詳細 ( 日産が目指す砂地や雪上も快適走行、「ヒントは月面にあり」 - ITpro )
https://ift.tt/EW0PwTa
No comments:
Post a Comment